гҖҖгҖҖзӣҙжөҒз„ЎеҲ·йӣ»ж©ҹ(jД«)е»ЈжіӣжҮ�(yД«ng)з”ЁдәҺиЁҲз®—ж©�(jД«)еӨ–еңҚиЁ�(shГЁ)еӮ������гҖҒж•ё(shГ№)жҺ§ж©ҹ(jД«)еә������гҖҒж©ҹ(jД«)еҷЁдәә���гҖҒдјәжңҚзі»зө�(tЗ’ng)гҖҒжұҪи»�����гҖҒ家йӣ»зӯүй �(lЗҗng)еҹҹгҖӮжң¬ж–Үд»Ӣзҙ№зҡ„йӣ»ж©ҹ(jД«)й©�(qЕ«)еӢ•йӣ»и·Ҝе°ұжҳҜжҹҗз©�(wДӣn)е®ҡе№іиҮәзҡ„и§’еәҰдјәжңҚжҺ§еҲ¶еӣһи·Ҝзҡ„й©…(qЕ«)еӢ•йғЁеҲ������гҖӮжң¬ж–ҮдёӯиЁ�(shГЁ)иЁҲзҡ„еҹәдәҺCPLDзҡ„йӣ»ж©�(jД«)й©�(qЕ«)еӢ•йӣ»и·��пјҢе……еҲҶеҲ©з”ЁcPLDзҡ„硬件еҸҜз·ЁзЁӢе’ҢеҜҰзҸ�(xiГ n)йӮҸијҜйҒ�(yГ№n)з®—ж–№дҫҝзҡ„зү№й»һ(diЗҺn)пјҢз”ЁдёҖзүҮCPLDд»ЈжӣҝеҺҹжңүеҚҒе№ҫзүҮйӮҸијҜй–Җе’ҢдёҖйғЁеҲҶ模擬йӣ»и·Ҝ��гҖӮйҮҮз”ЁVHDLиӘһиЁҖз·ЁзЁӢеҜҰзҸҫ(xiГ n)зӣёй—ң(guДҒn)йӮҸијҜ��гҖӮеҲ©з”ЁCPLDеңЁз·ҡеҸҜз·ЁзЁӢзҡ„зү№й»һ(diЗҺn)пјҢеҸҜд»ҘеҫҲж–№дҫҝзҡ„е°Қзі»зөұ(tЗ’ng)йҖ�(jГ¬n)иЎҢиӘҝ(diГ o)и©���гҖ�
гҖҖгҖҖ1 з„ЎеҲ·зӣҙжөҒйӣ»ж©ҹ(jД«)зҡ„й©…(qЕ«)еӢ•еҺҹзҗ�
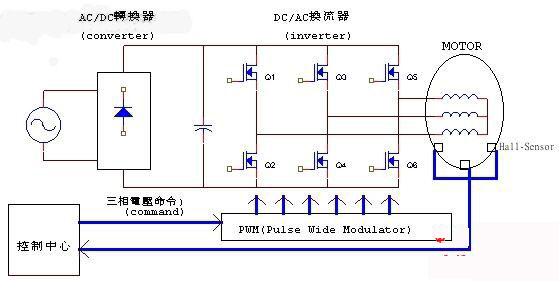
гҖҖгҖҖзӣҙжөҒз„ЎеҲ·йӣ»еӢ•ж©�(jД«)жҳҜз”ұйӣ»еӢ•ж©�(jД«)жң¬й«”�гҖҒиҪү(zhuЗҺn)еӯҗдҪҚзҪ®еӮіж„ҹеҷЁе’Ңйӣ»еӯҗй–Ӣй—�(guДҒn)йӣ»и·Ҝзө„жҲҗдёҖеҖӢй–үз’�(huГЎn)зі»зөұ(tЗ’ng)гҖӮиҲҮдёҖиҲ¬зҡ„жңүеҲ·йӣ»ж©ҹ(jД«)дёҚеҗҢ����пјҢд»–зҡ„е®ҡеӯҗзӮәйӣ»жЁһз№һзө„пјҢиҪү(zhuЗҺn)еӯҗйҮҮз”Ёж°ёзЈҒй«”�гҖӮжң¬ж–Үд»Ӣзҙ№зҡ„йӣ»еӢ•ж©�(jД«)йҮҮз”Ёдә�3зӣёYеһӢиҒҜ(liГЎn)зө�(jiГ©)зҡ„е…ЁжҺ§йӣ»и·ҜпјҢе…¶еҹәжң¬ж§Ӣ(gГІu)жҲҗеҰӮең�1жүҖзӨ����гҖ�
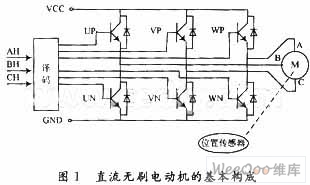
гҖҖгҖҖе…¶йӣ»еӯҗй–Ӣй—�(guДҒn)йӣ»и·ҜзӮ�6еҖӢIGBTзө„жҲҗзҡ„дёүзӣёйҖҶи®Ҡйӣ»и·Ҝ��гҖӮзӣҙжөҒз„ЎеҲ·йӣ»ж©�(jД«)й©�(qЕ«)еӢ•йӣ»и·Ҝзҡ„дҪңз”Ёе°ұжҳҜе°ҚдҫҶиҮӘйӣ»ж©�(jД«)иҪ�(zhuЗҺn)еӯҗдҪҚзҪ®еӮіж„ҹеҷЁзҡ„дҪҚзҪ®дҝЎиҷ�����гҖҒдҫҶиҮӘеӨ–йғЁзҡ„PWMжҺ§еҲ¶дҝЎиҷҹд»ҘеҸҠе…¶д»–жҺ§еҲ¶дҝЎиҷҹйҮҮ樣并йҖ�(jГ¬n)иЎҢиӯҜзў��пјҢдҪҝAпјҢB���пјҢCдёүзӣёз№һзө„иғҪжҢүиҰҒжұӮзҡ„й Ҷеә�?qЕ«)оһ�?��пјҢеҜҰзҸ�(xiГ n)е®ҡеӯҗз№һзө„зҡ„жӯЈзўәжҸӣзӣ�����пјҢеҫһиҖҢдҪҝйӣ»ж©ҹ(jД«)жӯЈеёёйҒ�(yГ№n)иЎ����гҖӮеңЁеҜҰйҡӣжҮ�(yД«ng)з”ЁдёӯйӮ„иҰҒе°Қйӣ»ж©�(jД«)зҡ„йҒҺеЈ“гҖҒж¬ еЈ����гҖҒйҒҺжө�����гҖҒйҒҺзҶұдҝқиӯ�(hГ№)зӯүйҖ�(jГ¬n)иЎҢиЁӯ(shГЁ)иЁ���гҖӮ并жҢүиҰҒжұӮйҖ�(jГ¬n)иЎҢе…үйӣ»йҡ”йӣўе’ҢеҹәжҘөй©�(qЕ«)еӢ•йӣ»и·ҜиЁӯ(shГЁ)иЁ����гҖ�
гҖҖгҖҖ2 зі»зөұ(tЗ’ng)зёҪй«”ж–№жЎҲиЁ�(shГЁ)иЁ�
гҖҖгҖҖйӣ»еӢ•ж©�(jД«)й©�(qЕ«)еӢ•йӣ»и·ҜеҢ…жӢ�3еҖӢйғЁеҲ���пјҢеҚіпј�
гҖҖгҖҖ(1)CPLDж ёеҝғжҺ§еҲ¶йӣ»и·Ҝ���пј�
гҖҖгҖҖ(2)й©�(qЕ«)еӢ•еҸҠйҡ”йӣўйӣ»и·Ҝпј�
гҖҖгҖҖ(3)IPMжҺҘеҸЈйӣ»и·Ҝ��пјӣе…¶зі»зөұ(tЗ’ng)жЎҶең–еҰӮең–2жүҖзӨ����гҖ�
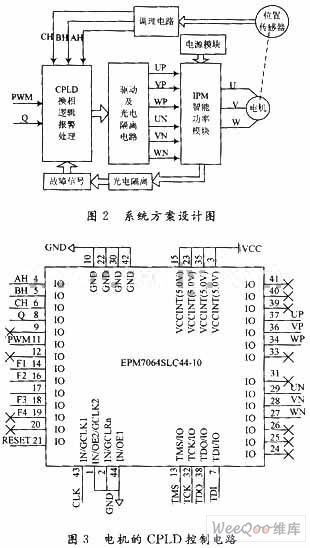
гҖҖгҖҖ3 硬件йӣ»и·ҜиЁ�(shГЁ)иЁ�
гҖҖгҖҖ3.1 CPLDжҺ§еҲ¶йӣ»и·Ҝ
гҖҖгҖҖи©ІйғЁеҲҶжҳҜйӣ»еӢ•ж©�(jД«)й©�(qЕ«)еӢ•йӣ»и·Ҝзҡ„ж ёеҝғйғЁеҲҶиҰӢең–3�пјҢе…¶дҝЎиҷҹйҮҮйӣҶгҖҒжҸӣзӣёиӯҜзў�����гҖҒжӯ»еҚҖ(qЕ«)зҷ�(fДҒ)з”ҹеҷЁиЁ�(shГЁ)иЁҲд»ҘеҸҠж•…йҡңиҷ•зҗҶеқҮз”ұи©ІйғЁеҲҶе®ҢжҲҗгҖӮйҮҮйӣҶзҡ„дҝЎиҷҹжңүпјҡйӣ»ж©ҹ(jД«)жҺ§еҲ¶еҷЁзҡ„PWMдҝЎиҷҹ����пјӣжӯЈеҸҚиҪү(zhuЗҺn)жҺ§еҲ¶дҝЎиҷҹпјӣ經(jД«ng)йҒҺж•ҙеҪўзҡ„йӣ»ж©ҹ(jД«)зҡ„йңҚзҲҫдҪҚзҪ®еӮіж„ҹеҷЁзҡ„дҪҚзҪ®дҝЎиҷ�����пјӣдҫҶиҮӘIPMжЁЎеЎҠзҡ„йӣ»ж©�(jД«)зҡ„ж¬ еЈ“гҖҒйҒҺеЈ��гҖҒйҒҺжөҒгҖҒйҒҺзҶұзӯүж•…йҡңжӘўжё¬дҝЎиҷҹ��гҖӮйҖҷдәӣдҝЎиҷҹијёе…ҘеҲ°CPLDеҗ���пјҢйҖҡйҒҺCPLDзҡ„и»ҹ件еҜҰзҸ�(xiГ n)жҸӣзӣёиӯҜзўј��гҖҒз·ЁзЁӢжӯ»еҚҖ(qЕ«)е’Ңйӣ»ж©�(jД«)дҝқиӯ·(hГ№)йӮҸијҜ�����пјҢијёеҮәжҺ§еҲ¶дҝЎиҷҹUPпјҢVP���пјҢWP�����пјҢUN�пјҢVN���пјҢWNеҲ°IPMзҡ„дёүзӣёйҖҶи®Ҡйӣ»и·Ҝ?��пјҹеҲӮйҪҗе§ҚC(jД«)зҡ„дёүзӣёйӣ»жЁһжӯЈзўәжҸӣзӣ��пјҢеҫһиҖҢдҪҝйӣ»ж©ҹ(jД«)жӯЈеёёйҒ�(yГ№n)иЎ�����гҖ�
гҖҖгҖҖйңҚзҲҫеӮіж„ҹеҷЁдҝЎиҷҹзҡ„ж•ҙеҪўйӣ»и·ҜеҰӮең–4жүҖзӨәпјҡ
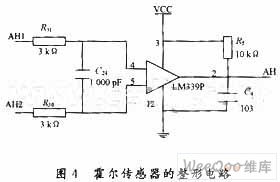
гҖҖгҖҖйҮҮз”Ё4и·ҜзІҫеҜҶйӣ»еЈ“жҜ”ијғеҷЁLM339е®ҢжҲҗгҖӮе°ҚдҫҶиҮӘйңҚзҲҫеӮіж„ҹеҷЁзҡ„дҝЎиҷҹйҖ�(jГ¬n)иЎҢж•ҙеҪ��пјҢ并е°ҚијёеҮәеҲ°CPLDзҡ„дҝЎиҷҹеҠ жҝҫжіўйӣ»е®№жҝҫжіўгҖ�
гҖҖгҖҖ3.2 й©�(qЕ«)еӢ•йҡ”йӣўйӣ»и·�
гҖҖгҖҖй©�(qЕ«)еӢ•йҡ”йӣўйӣ»и·ҜеҢ…жӢ¬е…үйӣ»йҡ”йӣўйӣ»и·Ҝе’ҢеҹәжҘөй©�(qЕ«)еӢ•йӣ»и·�����гҖ�
гҖҖгҖҖе…үйӣ»йҡ”йӣўйӣ»и·Ҝзҡ„дҪңз”ЁжҳҜеҜҰзҸҫ(xiГ n)CPLDжҺ§еҲ¶йӣ»и·ҜиҲҮIPMжЁЎеЎҠд№Ӣй–“зҡ„йӣ»ж°Јйҡ”йӣ������гҖӮйҡ”йӣўдҝЎиҷҹжңү2йғЁеҲҶпј�
гҖҖгҖҖ(1)CPLDијёеҮәеҲ°IPMжЁЎеЎҠзҡ„UPзӯүжҺ§еҲ¶дҝЎиҷ����пј�
гҖҖгҖҖ(2)IPMеҸҚйҘӢзөҰCPLDзҡ„йӣ»ж©�(jД«)ж•…йҡңиЁәж–·дҝЎиҷҹF1пјҢF(xiГ n)2�пјҢF(xiГ n)3пјҢF(xiГ n)4�пј�
гҖҖгҖҖUPзӯүдҝЎиҷҹзҡ„йӣ»ж°Јйҡ”йӣўйҮҮз”Ёй«ҳйҖҹе…үйӣ»иҖҰеҗҲиҠҜзүҮ6N137пјҢи©ІиҠҜзүҮзҡ„延йҒІжҷӮй–“зӮә75 ns����гҖӮеҸҜеҜҰзҸҫ(xiГ n)3 000 VDCзҡ„й«ҳйӣ»еЈ“йҡ”йӣў����пјҢйҒ©еҗҲдәҺйӣ»ж°ЈжҺ§еҲ¶е ҙеҗҲгҖӮIPMеҸҚйҘӢзөҰCPLDдҝЎиҷҹзҡ„йӣ»ж°Јйҡ”йӣўз”ұе…үйӣ»иҖҰеҗҲиҠҜзүҮ4N25е®ҢжҲҗ��пјҢеҰӮең�5жүҖзӨ������гҖ�

гҖҖгҖҖеҹәжҘөй©�(qЕ«)еӢ•йӣ»и·ҜйҮҮз”�9014дёүжҘөз®ЎпјҢ并дҪҝдёүжҘөз®Ўе·ҘдҪңеңЁй–Ӣй—ң(guДҒn)зӢҖж…�(tГ i)����гҖӮеўһеҠ жҺ§еҲ¶дҝЎиҷҹзҡ„й©�(qЕ«)еӢ•иғҪеҠӣпјҢ并жңҖзөӮијёеҮәжҺ§еҲ¶йӣ»еЈ“зөҰIPMжЁЎеЎҠзҡ„дёүзӣёйҖҶи®Ҡйӣ»и·Ҝ��гҖӮеҰӮең�6жүҖзӨәпјҡ

гҖҖгҖҖ3.3 IPMжҺҘеҸЈйӣ»и·ҜиЁ�(shГЁ)иЁ�
гҖҖгҖҖIPM(жҷәиғҪеҠҹзҺҮжЁЎеЎҠ)е°ҮеӨҡеҖӢIGBTйӣҶжҲҗеҲ°дёҖиө���пјҢе»ЈжіӣжҮү(yД«ng)з”ЁдәҺз„ЎеҷӘиҒІйҖҶи®Ҡеҷ����гҖҒдҪҺеҷӘиҒІUPSе’ҢдјәжңҚжҺ§еҲ¶еҷЁдё����гҖӮдёҖиҲ¬еҗ«жңүжҹөжҘөй©…(qЕ«)еӢ•гҖҒзҹӯи·Ҝдҝқиӯ�(hГ№)���гҖҒйҒҺеЈ“гҖҒйҒҺжөҒдҝқиӯ�(hГ№)зӯ������гҖӮжң¬ж–ҮйҮҮз”ЁдёүиҸұйӣ»ж©�(jД«)з”ҹз”ў(chЗҺn)зҡ„PM75CSA120зҡ„IPMжЁЎеЎҠеҜҰзҸҫ(xiГ n)й©�(qЕ«)еӢ•йӣ»ж©�(jД«)жүҖйңҖзҡ„дёүзӣёйҖҶи®Ҡйӣ»и·Ҝ�����гҖӮд»–е…�(nГЁi)йғЁйӣҶжҲ�6еҸӘIGBTпјҢжҜҸ2еҸӘе°ҚжҮ�(yД«ng)йӣ»ж©ҹ(jД«)зҡ„дёҖзӣ�����гҖӮе…¶йЎҚе®ҡиІ�(fГ№)ијүйӣ»жөҒзӮә75 AпјҢйЎҚе®ҡжҺ§еҲ¶йӣ»еЈ“зӮә1 200 V����гҖӮеҸҰеӨ–йӮ„йӣҶжҲҗйҒҺжөҒгҖҒйҒҺзҶ��гҖҒж¬ еЈ“гҖҒзҹӯи·Ҝзӯүж•…йҡңжӘўжё¬йӣ»и·Ҝ��пјҢе…¶зӨәж„Ҹең–еҰӮең�7жүҖзӨ���гҖ�

гҖҖгҖҖеҮәзҸҫ(xiГ n)ж•…йҡңжҷ������пјҢIPMжңғе°ҮжӘўжё¬дҝЎиҷҹFOйҖҒеҲ°CPLDйҖ�(jГ¬n)иЎҢиҷ•зҗ�����пјҢйҮҮеҸ–зӣёжҮ�(yД«ng)зҡ„жҺӘж–ҪпјҢжҸҗй«ҳзі»зөұ(tЗ’ng)зҡ„еҸҜйқ жҖ�����гҖ�
гҖҖгҖҖIPMе·ҘдҪңйңҖиҰҒе–®зҚ�(dГә)зҡ„йӣ»жәҗдҫӣйӣ��пјҢиҲҮжҺ§еҲ¶йӣ»и·Ҝйӣ»жәҗеҡ�(yГЎn)ж јеҲҶй–��гҖӮе…¶дёӯдёҠж©ӢиҮӮзҡ�3еҖӢIGBTеҗ„иҮӘйңҖиҰ�1и·Ҝйӣ»жәҗпјҢдёӢж©ӢиҮӮзҡ„3еҖӢIGBTе…ұз”Ё1еҖӢйӣ»жә��пјҢйҖҷжЁЈе°ұйңҖиҰ�4и·Ҝйӣ»жәҗгҖӮе…¶йӣ»жәҗжЁЎеЎҠзҡ„йӣ»и·ҜеҰӮең�8жүҖзӨ���гҖ�
гҖҖгҖҖжҷәиғҪеҠҹзҺҮжЁЎеЎҠе°ҮеҠҹзҺҮйӣ»еӯҗеҷЁд»¶е’Ңй©�(qЕ«)еӢ•йӣ»и·ҜйӣҶжҲҗеҲ°дёҖиө�����пјҢ并且內(nГЁi)и—Ҹжңүж•…йҡңжӘўжё¬йӣ»и·ҜпјҢдёҚеғ…й«”з©Қе°Ҹ��пјҢиҖҢдё”еҸҜйқ жҖ§й«ҳ�����гҖ�
гҖҖгҖҖ4 зі»зөұ(tЗ’ng)и»ҹ件иЁ�(shГЁ)иЁ�
гҖҖгҖҖ4.1 и»ҹ件ж§�(gГІu)жһ¶иЁӯ(shГЁ)иЁ�
гҖҖгҖҖCPLDзҡ„и»ҹ件йҮҮз”ЁVHDLиӘһиЁҖз·ЁзЁӢеҜҰзҸҫ(xiГ n)��гҖӮи»ҹ件模еЎҠй–“зҡ„зЁӢеәҸ并иЎҢеҹ·(zhГӯ)иЎ�����пјҢжІ’жңүзЁӢеәҸжөҒзЁӢең–�пјҢеҸӘиғҪз”ЁзЁӢеәҸжһ¶ж§Ӣ(gГІu)иЎЁзӨәгҖӮCPLDзҡ„и»ҹ件主иҰҒжңүйӣ»ж©ҹ(jД«)зҡ„жҸӣзӣёиӯҜзў������гҖҒжӯ»еҚҖ(qЕ«)зҷ�(fДҒ)з”ҹеҷЁиЁ�(shГЁ)иЁҲгҖҒж•…йҡңиҷ•зҗҶе’ҢPWMиҲҮиҪү(zhuЗҺn)еҗ‘жҺ§еҲ¶зӯүеҠҹиғҪ����пјҢе…¶и»ҹ件ж§�(gГІu)жһ¶еҰӮең�9жүҖзӨәгҖ�

гҖҖгҖҖ4.2 жҸӣзӣёиӯҜзўјзЁӢеәҸиЁ�(shГЁ)иЁ�
гҖҖгҖҖжҸӣзӣёиӯҜзўјеҷЁзҡ„дҪңз”ЁжҳҜж №ж“�(jГ№)з•�(dДҒng)еүҚдҪҚзҪ®дҝЎиҷҹе’ҢPWMжҺ§еҲ¶дҝЎиҷҹд»ҘеҸҠиҪ�(zhuЗҺn)еҗ‘жҺ§еҲ¶дҝЎиҷҹQ�����пјҢзўәе®ҡеҮәUP����пјҢVPпјҢWP����пјҢUNпјҢVN�����пјҢWNзҡ„зӣёжҮ�(yД«ng)еҖ������гҖӮйңҖиҰҒеҜҰзҸ�(xiГ n)зҡ„йӮҸијҜиЎЁйҒ�(dГЎ)ејҸзӮәпј�

гҖҖгҖҖ4.3 жӯ»еҚҖ(qЕ«)зҷ�(fДҒ)з”ҹеҷЁиЁ�(shГЁ)иЁ�
гҖҖгҖҖзӮәйҳІжӯўдёүзӣёйҖҶи®Ҡйӣ»и·ҜдёҠдёӢж©ӢиҮӮзҡ„IGBTз”�(chЗҺn)з”ҹвҖңе…ұж…�(tГ i)е°�(dЗҺo)йҖҡвҖқзҡ„зҸ�(xiГ n)иұЎпјҢе°�(dЗҺo)иҮҙзҹӯи·����гҖӮйңҖиҰҒзөҰIGBTзҡ„жҺ§еҲ¶дҝЎиҷҹзҡ„дёҠеҚҮжІҝиЁӯ(shГЁ)зҪ®жӯ»еҚҖ(qЕ«)��пјҢдҪҝе…¶еңЁдёҖж®ө延жҷӮд№ӢеҗҺжүҚзңҹжӯЈйҒ�(dГЎ)еҲ°й«ҳйӣ»е№і����гҖ�
гҖҖгҖҖжӯ»еҚҖ(qЕ«)зҷ�(fДҒ)з”ҹеҷЁиЁ�(shГЁ)иЁҲйҮҮз”ЁйЈҪе’ҢиЁҲж•�(shГ№)еҷЁзҡ„ж–№ејҸ��пјҢйЎһдјјдәҺйӣ»е®№зҡ„е……ж”ҫйӣ»йҒҺзЁӢ�����пјҢйңҖз”�(chЗҺn)з”ҹеҰӮең�10жүҖзӨәзҡ„жҷӮеәҸ����гҖӮе…¶иҰ�(guД«)еүҮзӮәпј�
гҖҖгҖҖ(1)з•�(dДҒng)UP[_]INијёе…ҘзӮ�0жҷӮпјҢеҰӮжһңиЁҲж•ё(shГ№)еҖјTзӯүдәҺ0����пјҢеүҮиЁҲж•ё(shГ№)еҖјTдҝқжҢҒдёҚи®ҠпјҢеҗҰеүҮдҪңжё�1иЁҲж•ё(shГ№)����пј�
гҖҖгҖҖ(2)з•�(dДҒng)UP[_]INијёе…ҘзӮ�1жҷӮпјҢеҰӮжһңиЁҲж•ё(shГ№)еҖјTзӯүдәҺmax����пјҢеүҮиЁҲж•ё(shГ№)еҖјTдҝқжҢҒдёҚи®ҠпјҢеҗҰеүҮеҒҡеҠ�1иЁҲж•ё(shГ№)��пј�
гҖҖгҖҖ(3)з•�(dДҒng)ијёе…ҘзӮ�1дё”жӯ»еҚҖ(qЕ«)иЁҲж•ё(shГ№)еҷЁж•ё(shГ№)еҖјTзӮәMAXжҷ���пјҢUP=1е°ҚжҮү(yД«ng)IGBTе°�(dЗҺo)йҖ��пј�
гҖҖгҖҖ(4)з•�(dДҒng)жӯ»еҚҖ(qЕ«)иЁҲж•ё(shГ№)еҷЁж•ё(shГ№)еҖјеңЁ0пҪһMAXд№Ӣй–“жҷӮпјҢUP=0��пјҢе°ҚжҮ�(yД«ng)IGBTй—�(guДҒn)й–������пј�
гҖҖгҖҖдёӢйқўзӮәжӯ»еҚҖ(qЕ«)жҷӮй–“зӮәNеҖӢжҷӮйҗҳе‘Ёжңҹзҡ„VHDLзЁӢеәҸ����пјҢзЁӢеәҸзҡ„йҒ�(yГ№n)иЎҢзөҗ(jiГ©)жһңеҰӮдёӢгҖ�


гҖҖгҖҖ4.4 IPMж•…йҡңиҷ•зҗҶ
гҖҖгҖҖеңЁзі»зө�(tЗ’ng)дёӯж•…йҡңжӘўжё¬дҝЎиҷҹзҡ„иҷ•зҗҶжҳҜжҠҠдҝЎиҷҹеј•е…ҘеҲ°CPLDдё�����пјҢ然еҗҺUPеҜҰзҸҫ(xiГ n)зҡ„йӮҸијҜеҗҺијёеҮәпјҢж—ўдҝқиӯүIPMеҮәзҸҫ(xiГ n)ж•…йҡңжҷӮпјҢUPз„ЎијёеҮ�����пјҢеҸҲдҝқиӯүUPиҲҮUNзҡ„еҸҚйӮҸијҜгҖ�
гҖҖгҖҖ5 зө�(jiГ©) иӘ�
гҖҖгҖҖд»Ӣзҙ№дёҖзЁ®йҮҮз”ЁCPLDеҒҡж ёеҝғжҺ§еҲ¶еҷЁзҡ„з„ЎеҲ·зӣҙжөҒйӣ»еӢ•ж©ҹ(jД«)зҡ„й©…(qЕ«)еӢ•йӣ»и·Ҝзҡ„иЁ�(shГЁ)иЁ��гҖӮеҜҰзҸ�(xiГ n)йӣ»ж©ҹ(jД«)й©�(qЕ«)еӢ•жүҖйңҖзҡ„жҸӣзӣёйӮҸијҜгҖҒйӣ»ж©�(jД«)йҒ�(yГ№n)иЎҢж•…йҡңиҷ•зҗҶд»ҘеҸҠеҸҜд»ҘйқҲжҙ»иЁӯ(shГЁ)зҪ®жӯ»еҚҖ(qЕ«)жҷӮй–“зҡ„жӯ»еҚҖ(qЕ«)зҷ�(fДҒ)з”ҹеҷЁ��гҖӮи©Ійӣ»ж©ҹ(jД«)й©�(qЕ«)еӢ•йӣ»и·ҜеҸҜд»Ҙз”ЁдәҺй«ҳзІҫеәҰзҡ„дјәжңҚжҺ§еҲ¶зі»зө�(tЗ’ng)дё����гҖ�